Constant Deceleration¶
The Constant Deceleration profile calculates a trapezoidal profile that maintains a constant deceleration rate from the starting velocity to the end velocity.
If the intermediate velocity between the starting and end velocities is less than the reference velocity, the profile calculates a trapezoidal profile based on the reference velocity, acceleration, and deceleration. The axis reaches the target position when it achieves the end velocity.
The minimum value for the automatically calculated deceleration (or acceleration) is 0.000001 (User Unit/second^2). If the starting and end velocities are close, or if the target position is far such that the calculated deceleration (or acceleration) falls below this minimum value, it is set to the minimum value.
When this profile is used with an override command, specifying 0 as the starting velocity allows to set the override speed at the moment of the override to the starting velocity. The behavior when 0 is specified as the starting velocity is the same as for other profiles.
This profile uses the following parameters:
Parameter |
Description |
|---|---|
Reference velocity |
|
Reference acceleration |
|
Reference deceleration |
|
Starting velocity |
|
End velocity |
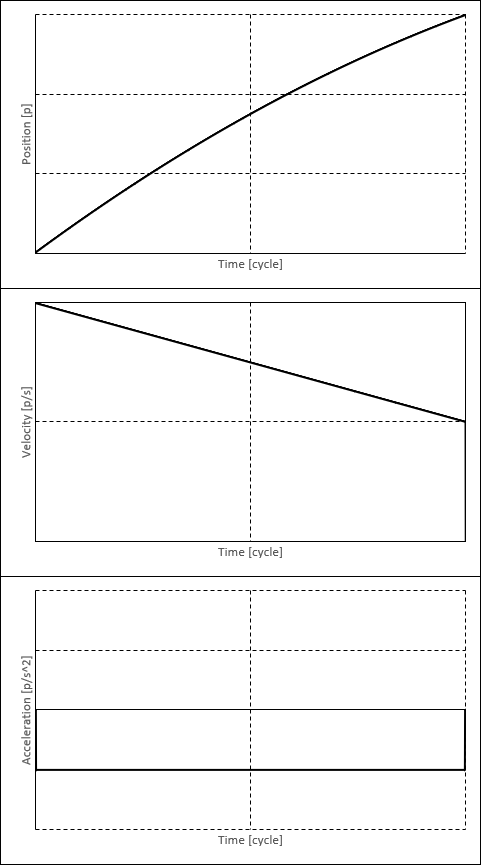
The following plots show the position, velocity, and acceleration of a constant deceleration profile.
The constant deceleration profile does not support jog commands or velocity commands.
Even in situations where a constant deceleration profile cannot be established, such as when the starting velocity is 0, movement is still possible by setting the reference velocity to a value greater than 0. In such cases, a trapezoidal profile is calculated.
When performing an override using the constant deceleration profile, the movement time may become excessively long if the starting and end velocities are close or the target position is far. To prevent this, set the reference velocity to a value greater than 0. In such cases, the reference acceleration and deceleration are also considered.