Flow Control¶
Several functions in the API buffer provide simple flow control for the API buffer, so that a part of the API buffer can be executed only if a particular condition is satisfied.
The available flow control functions are listed below:
These flow control functions can be nested up to 100 levels.Flow Control Example
The following code will execute motion based on the I/O output state as described below:
If bit 0.0 is on, the first axis will execute motion.
Otherwise, if bit 0.1 is on, the second axis will execute motion.
Otherwise, the third axis will execute motion.
The motion will be in the positive direction if bit 0.2 is on and in the negative direction if bit 0.2 is off.
wmx3Api::Motion::PosCommand pos;
wmx3Api::ApiBufferCondition cond;
wmxlib_ApiBuffer->StartRecordBufferChannel(0);
pos.profile.type = ProfileType::Trapezoidal;
pos.profile.velocity = 10000;
pos.profile.acc = 10000;
pos.profile.dec = 10000;
//Set the IF branch
cond.bufferConditionType = ApiBufferConditionType::IOOutput;
cond.arg.ioOutput.byteAddress = 0;
cond.arg.ioOutput.bitAddress = 0;
wmxlib_ApiBuffer->FlowIf(&cond);
//Set the nested IF branch
cond.arg.ioOutput.byteAddress = 0;
cond.arg.ioOutput.bitAddress = 2;
wmxlib_ApiBuffer->FlowIf(&cond);
//Add position command
pos.axis = 0;
pos.target = 10000;
wmxlib_CoreMotion->motion->StartMov(&pos);
//Set the nested ELSE branch
wmxlib_ApiBuffer->FlowElse();
//Add position command
pos.axis = 0;
pos.target = -10000;
wmxlib_CoreMotion->motion->StartMov(&pos);
//Set the nested END IF
wmxlib_ApiBuffer->FlowEndIf();
//Set the ELSE IF branch
cond.arg.ioOutput.byteAddress = 0;
cond.arg.ioOutput.bitAddress = 1;
wmxlib_ApiBuffer->FlowElseIf(&cond);
//Set the nested IF branch
cond.arg.ioOutput.byteAddress = 0;
cond.arg.ioOutput.bitAddress = 2;
wmxlib_ApiBuffer->FlowIf(&cond);
//Add position command
pos.axis = 1;
pos.target = 10000;
wmxlib_CoreMotion->motion->StartMov(&pos);
//Set the nested ELSE branch
wmxlib_ApiBuffer->FlowElse();
//Add position command
pos.axis = 1;
pos.target = -10000;
wmxlib_CoreMotion->motion->StartMov(&pos);
//Set the nested END IF
wmxlib_ApiBuffer->FlowEndIf();
//Set the ELSE branch
wmxlib_ApiBuffer->FlowElse();
//Set the nested IF branch
cond.arg.ioOutput.byteAddress = 0;
cond.arg.ioOutput.bitAddress = 2;
wmxlib_ApiBuffer->FlowIf(&cond);
//Add position command
pos.axis = 2;
pos.target = 10000;
wmxlib_CoreMotion->motion->StartMov(&pos);
//Set the nested ELSE branch
wmxlib_ApiBuffer->FlowElse();
//Add position command
pos.axis = 2;
pos.target = -10000;
wmxlib_CoreMotion->motion->StartMov(&pos);
//Set the nested END IF
wmxlib_ApiBuffer->FlowEndIf();
//Set the END IF
wmxlib_ApiBuffer->FlowEndIf();
wmxlib_ApiBuffer->EndRecordBufferChannel();
wmxlib_ApiBuffer->Execute(0);
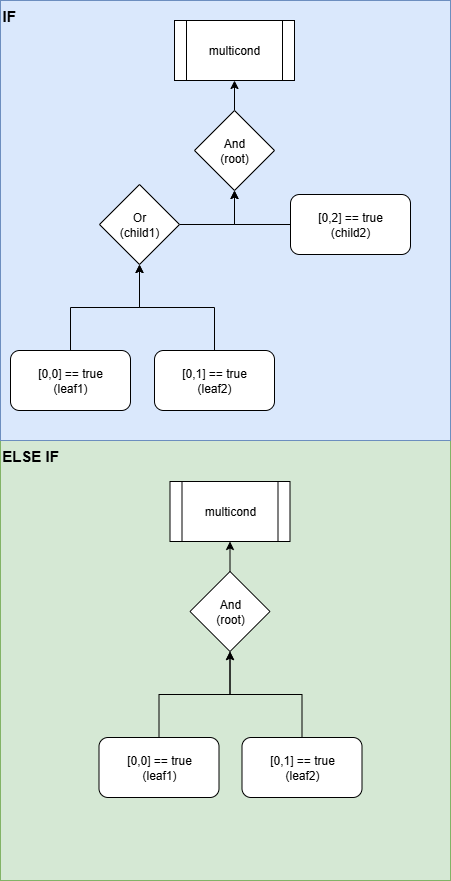
Flow Control With Multi-Condition Example
The following code will execute motion based on the I/O output state as described below:
If bit 0.0 or bit 0.1 is on while bit 0.2 is on, the first axis will execute motion.
Otherwise, if both bit 0.0 and bit 0.1 is on, the second axis will execute motion.
Otherwise, the third axis will execute motion.
wmx3Api::Motion::PosCommand pos;
wmx3Api::ApiBufferMultiCondition multicond;
wmx3Api::ApiBufferCondition cond;
int root, child1, child2, leaf1, leaf2;
wmxlib_ApiBuffer->StartRecordBufferChannel(0);
pos.profile.type = ProfileType::Trapezoidal;
pos.profile.velocity = 10000;
pos.profile.acc = 10000;
pos.profile.dec = 10000;
//Set the IF branch
root = multicond.AddGateNode(ApiBufferConditionNodeType::And);
child1 = multicond.AddGateNode(ApiBufferConditionNodeType::Or, root);
cond.bufferConditionType = ApiBufferConditionType::IOOutput;
cond.arg.ioOutput.byteAddress = 0;
cond.arg.ioOutput.bitAddress = 0;
leaf1 = multicond.AddLeafNode(&cond, child1);
cond.arg.ioOutput.bitAddress = 1;
leaf2 = multicond.AddLeafNode(&cond, child1);
cond.arg.ioOutput.bitAddress = 2;
child2 = multicond.AddLeafNode(&cond, root);
wmxlib_ApiBuffer->FlowIf(&multicond);
//Add position command
pos.axis = 0;
pos.target = 10000;
wmxlib_CoreMotion->motion->StartMov(&pos);
//Set the ELSE IF branch
multicond.clear();
cond.arg.ioOutput.bitAddress = 0;
leaf1 = multicond.AddLeafNode(&cond);
cond.arg.ioOutput.bitAddress = 1;
leaf2 = multicond.AddLeafNode(&cond);
root = multicond.AddGateNode(ApiBufferConditionNodeType::And);
multicond.ConnectParentChild(root, leaf1);
multicond.ConnectParentChild(root, leaf2);
wmxlib_ApiBuffer->FlowElseIf(&multicond);
//Add position command
pos.axis = 1;
pos.target = 10000;
wmxlib_CoreMotion->motion->StartMov(&pos);
//Set the ELSE branch
wmxlib_ApiBuffer->FlowElse();
//Add position command
pos.axis = 2;
pos.target = 10000;
wmxlib_CoreMotion->motion->StartMov(&pos);
//Set the END IF
wmxlib_ApiBuffer->FlowEndIf();
wmxlib_ApiBuffer->EndRecordBufferChannel();
wmxlib_ApiBuffer->Execute(0);
The diagram below illustrates the multi-condition tree defined in the code.