PID Parameter¶
PID parameters are configured using PidParam, which is part of the ClosedLoopParam. The diagram below illustrates how the PID controller fits into the closed-loop control system:
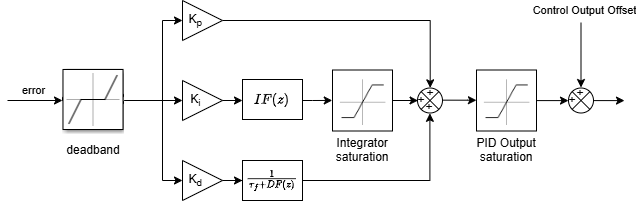
proportionalGain sets the proportional gain (P).
integralGain sets the integral gain (I).
derivativeGain sets the derivative gain (D).
Additional parameters and considerations for the digital PID controller include the following:
Discretization of Integrator IF(z)
The integrator is discretized using the Tustin approximation (trapezoidal integration), and represented in the z-domain as shown:
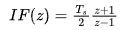
Ts is the sampling period in seconds and is equal to the communication cycle time.
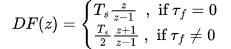
Time Constant and Discretization of Differentiator DF(z)
derivativeFilterTimeConstant represents the time constant of the first-order low-pass filter (LPF) applied to the derivative term.
High-frequency noise sensitivity of the differentiator makes it essential to set derivativeFilterTimeConstant appropriately considering the sensor noise frequency characteristics along with the Nyquist frequency determined by Ts.
Discretization behavior:
If derivativeFilterTimeConstant is set to 0, the differentiator uses the backward Euler method.
Otherwise, the Tustin approximation is applied, as shown:
Please also see Derivative Filter Time Constant
Deadband
The deadband parameter defines a threshold around zero where small input errors are ignored. For a positive deadband value d, the input error e is adjusted as follows:
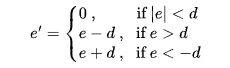
This helps avoid abrupt or unnecessary control actions near the zero-error region, ensuring the controller only responds to meaningful deviations.
Set this to 0 to disable deadband.
Saturation
Saturation parameters protect against excessive control outputs and integral windup:
limitIntegral sets the maximum limit for the integral term, helping to prevent windup.
limitOutput defines the maximum output value the PID controller can produce, to protect against exceeding physical or safety limits.
Set either parameter to 0 to disable that specific saturation limit.
Control Output Offset
The offset determines the operating point, or an equilibrium point where system stays at rest if undisturbed.
controlOutputOffset : Defines a constant offset added to the PID controller’s output. The unit of this offset depends on the command mode of the axis. For example, in Position mode, the offset is expressed in User Units.